Hexapod
Summary
This page describes how to build a “search and rescue walking robot (APC -1). It was originally designed by AlexKorvin and published at thingiverse. As the original author pointed out – of course it’s not a real rescue robot. It’s just a cute concept of what it may look like.
On this page you will find complete instructions now to build such a robot.
What you will need to do
- Buy components from bill of materials (BOM)
- 3d printed parts
- Install and configure software
- Assemble robot
Components from bill of materials (BOM)
- 19x Original MG92B - http://ali.pub/53ndy7
- 1x Original MG996R - http://ali.pub/5b88a1
- LEDs - http://ali.pub/5cp7r9
- 6x Yellow
- 6x Red
- 2x White
- 14x 100 Ohm Resistors (for LEDs) - http://ali.pub/5cp7ww
- Breadboard for head power distribution
- 2x Power keys (mosfets) - http://ali.pub/5b8ahy
- 1x charge indicator - http://ali.pub/5b890o
- 2x Cooler 4010 - http://ali.pub/5b8drz
- Carbon tubes (5x3x400 mm) - http://ali.pub/5b8bxa
- 18x Bearing MF63ZZ (3x6x2.5 mm) - http://ali.pub/53o9wx
- 1x Head Mount Bearing (F604zz) - http://ali.pub/5cpa6d
- 30x Cage nuts \ bushings (M3x6) - http://ali.pub/4suuwh
- 36x Screws M2x8 - http://ali.pub/49vq4i
- 36x Nuts M2 - http://ali.pub/49vq1e
- Screws m3 - https://www.aliexpress.com/item/10000150053486.html
- 1x XT60 Connector - http://ali.pub/5cpai8
- JST connectors - http://ali.pub/510ugc
- Wires:
- 16 AWG - https://www.aliexpress.com/item/1005001568846789.html
- 20 AWG - https://www.aliexpress.com/item/1005001568846789.html
- Nylon braid:
- 8mm - https://www.aliexpress.com/item/32883104236.html
- 5mm - https://www.aliexpress.com/item/32883104236.html
- 1x Power Supply - https://www.aliexpress.com/item/32851821363.html
- 1x Raspberry Pi Zero W - https://www.raspberrypi.com/products/raspberry-pi-zero-w/
- 1x MicroSD card 16Gb
- 2x PWM 16 channel control board – https://www.adafruit.com/product/815
3d print parts
Black
- Base\1x base_connector_v2.stl
- Base\1x Base filter part 1
- Base\1x Base filter part 2
- Base\1x Base Servo Mount (Center)
- Base\1x Base Servo Mount (Front)
- Base\1x Base Servo Mount (Rear)
- Base\1x Charger cover
- Base\1x Head servo Mount MG996
- Base\1x Middle Base cover (with bearing) V1.1
- Base\1x Upper bearing cover
- Head\1x Back protection
- Head\1x bottom protection
- Head\1x Cable fixing
- Head\1x Charge indicator cover
- Head\1x Flashlight lens retainer
- Head\1x head_electric_mount
- Head\1x Head Mount V1.1
- Head\1x Mount for camera and flashlight
- Head\1x Top Protection
- Head\2x Filter holder
- Head\2x Retainer for small lamp lens
- Head\2x Ventilation cover
- Legs\3x TIBIA V1.1 left
- Legs\3x TIBIA V1.1 right
- Legs\6x COXA (part 1)
- Legs\6x COXA (part 2)
Silver or gray
- Head\1x Head base (one piece)
- Head\1x Left side
- Head\1x right side
- Legs\3x FEMUR left
- Legs\3x FEMUR right
Accent color
- Base\1x Base
- Base\1x Front Base Cover
- Base\1x Rear base cover
- Head\1x Head cover left
- Head\1x Head cover right
Transparent or White
- Base\2x Marker light for head
- Base\6x Marker light for leg
- Legs\3x TIBIA V1.1 left cover
- Legs\3x TIBIA V1.1 right cover
Rubber or soft plastic
- Legs\6x tip of the leg
Software
Install and configure Raspbian
There are tons of installation guides on the internet. Just google it (For me the first link in google was this site). We need headless mode (without graphical interface)
Configure Raspbian
- Enable ssh (though file modification on sd card)
- Enable wifi (though file modification on sd card)
- Connect using ssh
- Configure Xbox One controller support and pair controller
- Edit
/etc/bluetooth/main.confand set:
[General]
ControllerMode = dual
Privacy = device
Install APC-1 software
- Clone code repository
- Install all dependencies from requirements.txt (preferably in virtualenv)
Assembly Everything
You’ll primarily need to follow this guide. Except few notable difference: * Mount of electronics in base * Mount of electronics in head
Optional changes, that I personally recommend: * Use braided sleeving instead shrinking tube (it looks and feels better) * Do not cut servo wires. There is enough room to keep it inplace
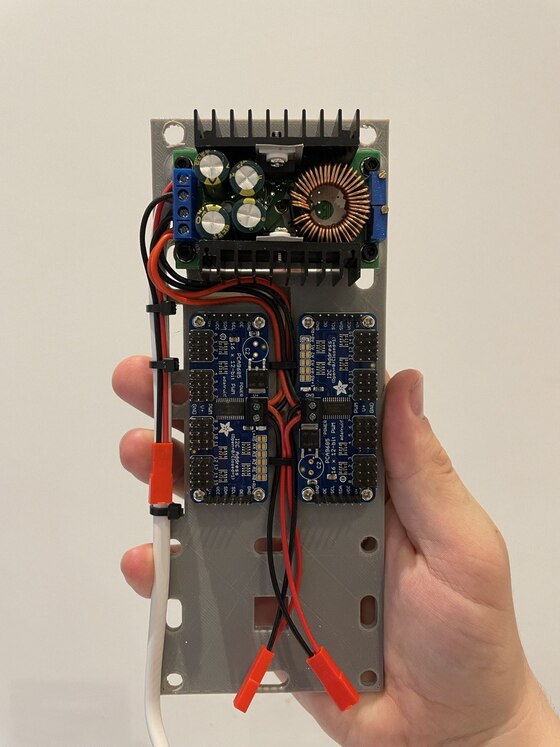
Base electronics
Use base_connector_v2 to mount all internal electronics before putting it into base. It should look like this:
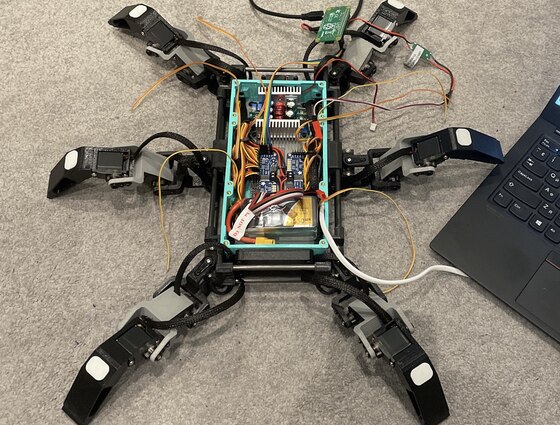
After that insert base_connector into base chassis, you should get something like this:
Servo connection orider: TBD
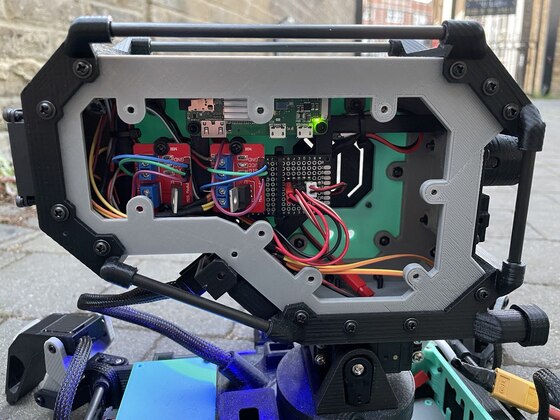
Head electronics
Use a small breadboard to create a power distribution circuit (5v). Use head_electric mount to mount all of your electronics before putting it into the head. You should get something like this:
How to calibrate
- Press a calibration button to switch robot in calibration mode
- Use vertical dpad buttons to change position of the servo
- Use horizontal dpad buttons to switch between servos
Here is an example: